Portfolio
Hi! I’m Mohamad Amierul Hakeem, penultimate year MEng Mechatronics Student at the University of Manchester, on track for first-class honours graduating in Summer 2026.
I am passionate about anything electronics, robotics and embedded systems which can be seen with my involvemnt in a range of projects below.
This is page is just a summary of my current/past projects. I am planning to write atleast one blog post for each of them soon in the future as the website is still new and i am currently busy with courseworks.
I am currently actively looking for summer internship position for summer 2025. Here is my latest general CV in pdf version: CV in .pdf version
Projects
Formula Student Vehicle Control Unit (VCU) Development
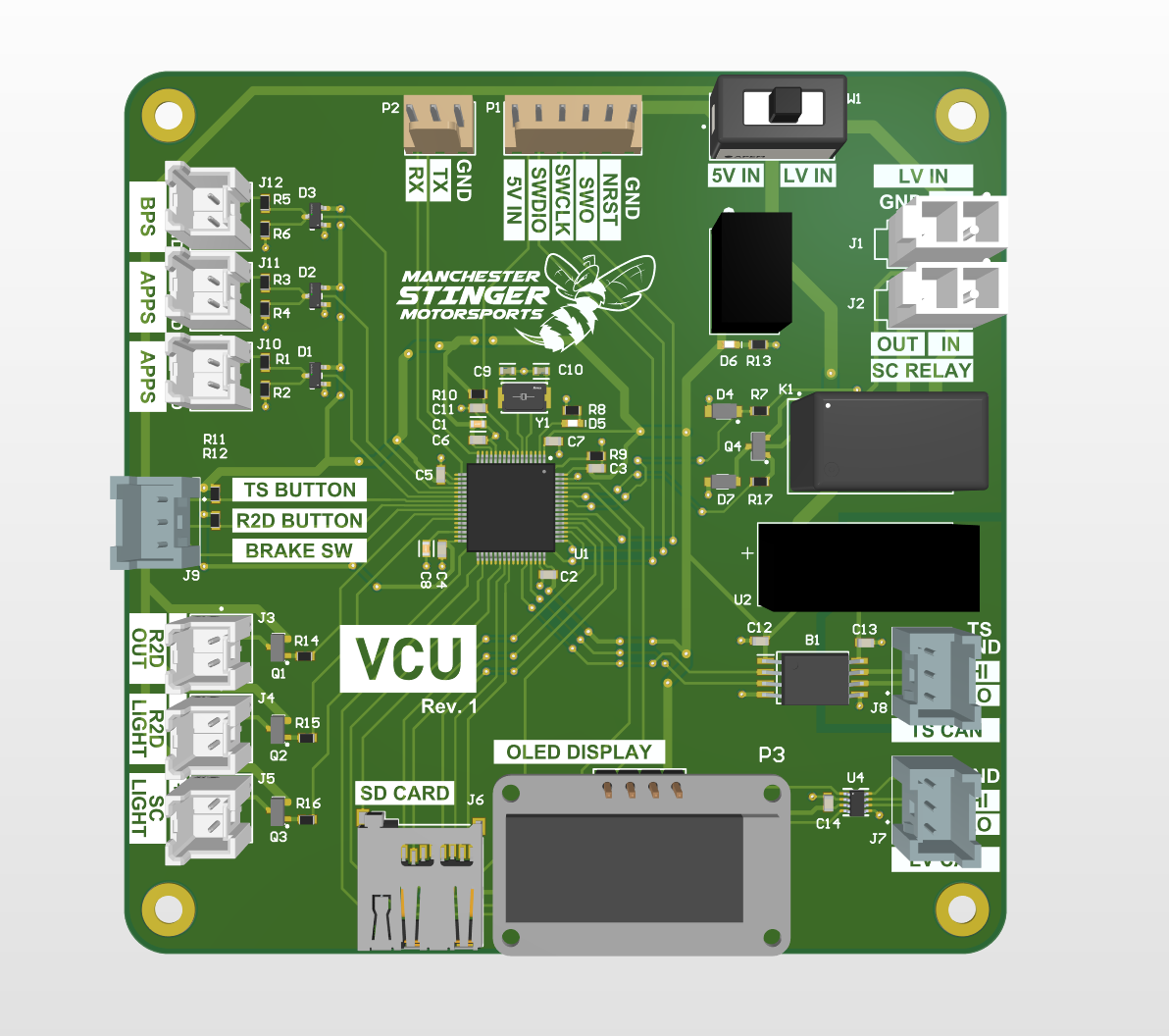 VCU PCB top view designed in Altium Designer
VCU PCB top view designed in Altium Designer
The “brain” of our EV Formula Student car implemented with FreeRTOS, critical for managing core functionalities such as throttle control, telemetry and fault detection/handling.
Autonomous Line Following Buggy
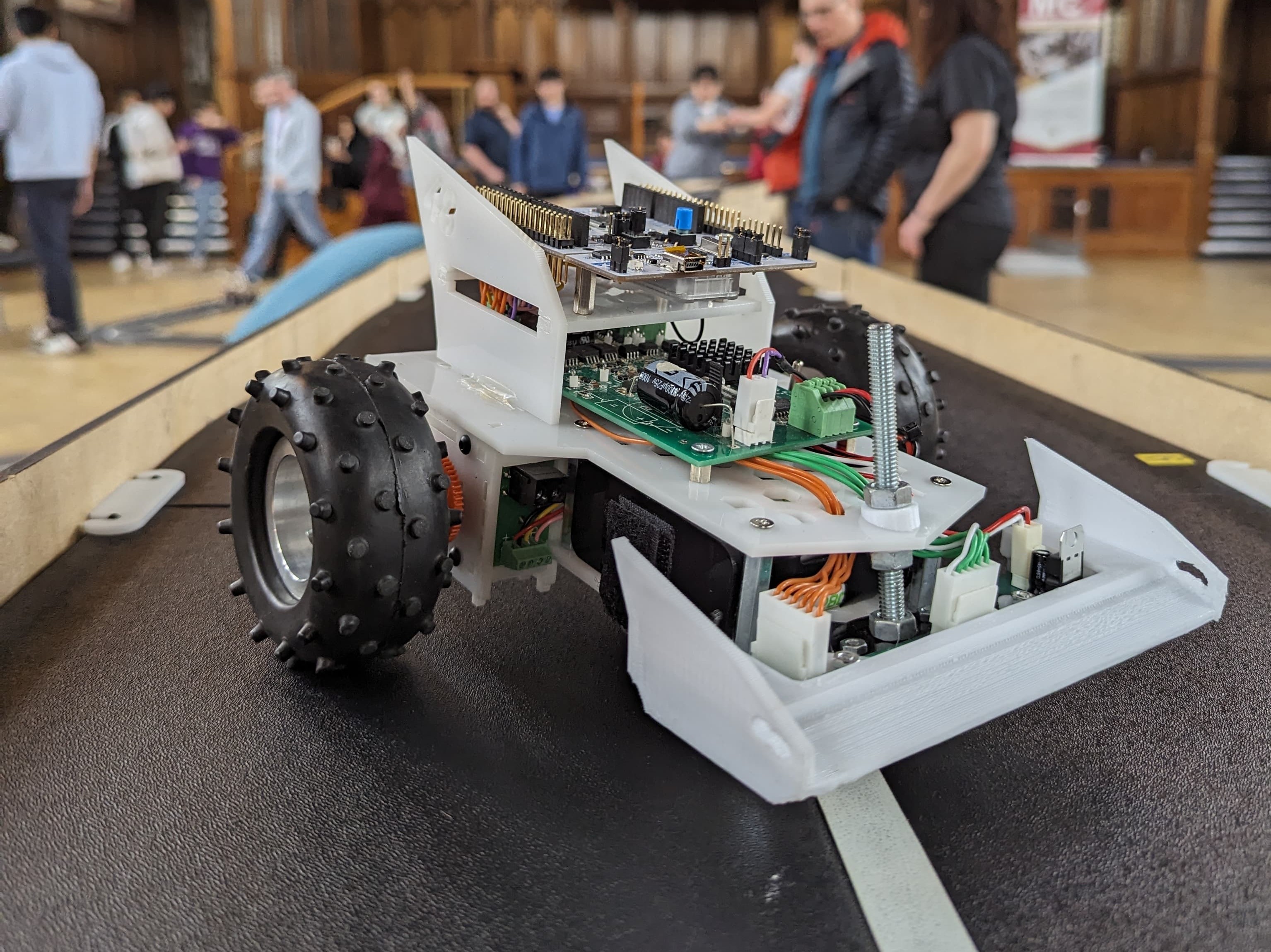 Final race day: buggy picture
Final race day: buggy picture
Final Race Winner! Designed and built a custom autonomous buggy, programmed with Mbed in C++. Implemented cascaded PID control, state machine architecture, with multiple timer interrupts.
[Buggy Github Repo], [Article]
Formula Student Battery Management System (BMS)
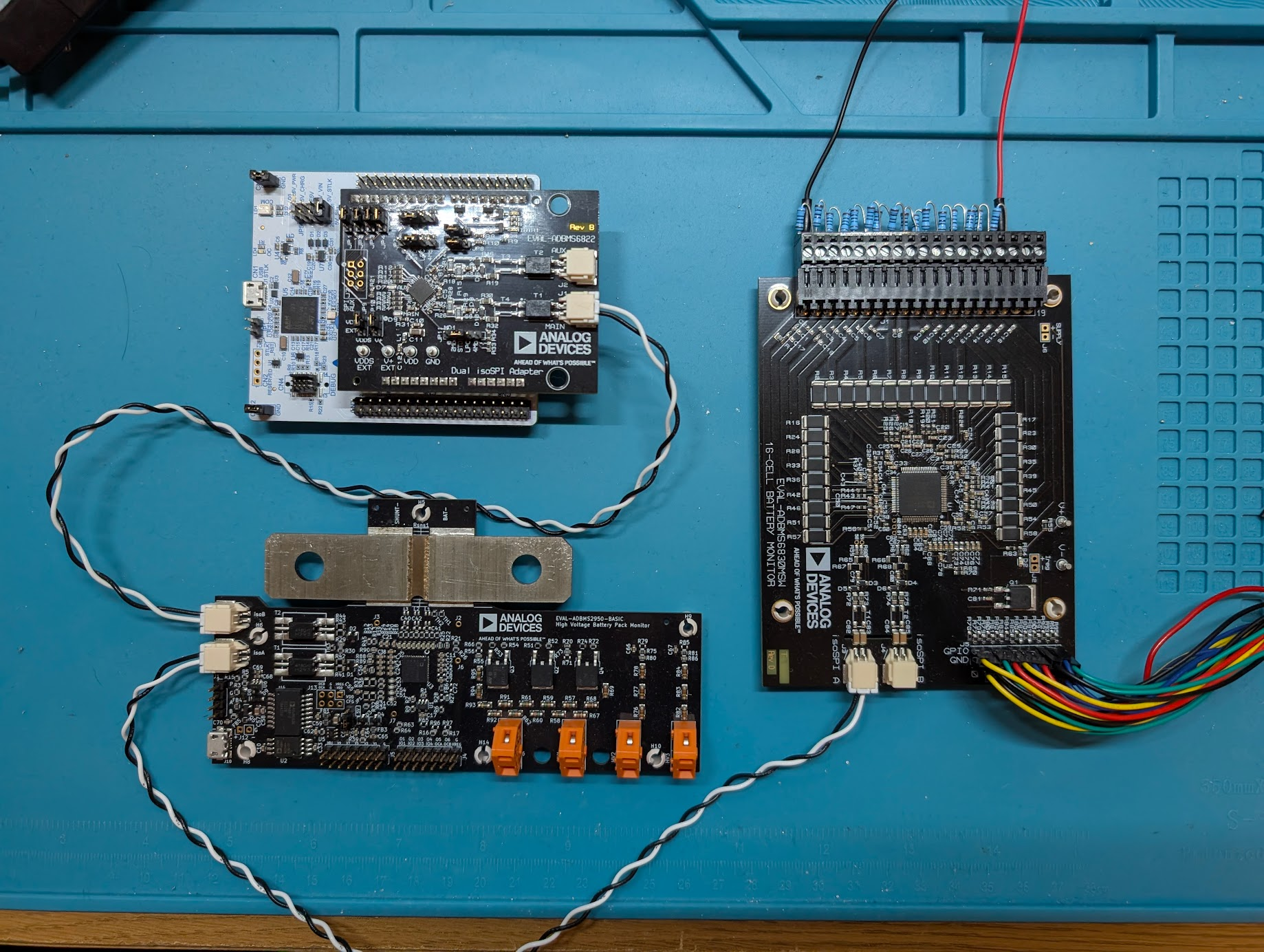 ADBMS Boards from Analog Devices connected in isoSPI daisy chain
ADBMS Boards from Analog Devices connected in isoSPI daisy chain
Microcontroller firmware that manages the safety of the car’s 400V+ battery pack. It includes my own custom SPI-to-isoSPI hardware driver for communication with ADMBS ICs.
Brake System Plausibility Device (BSPD)
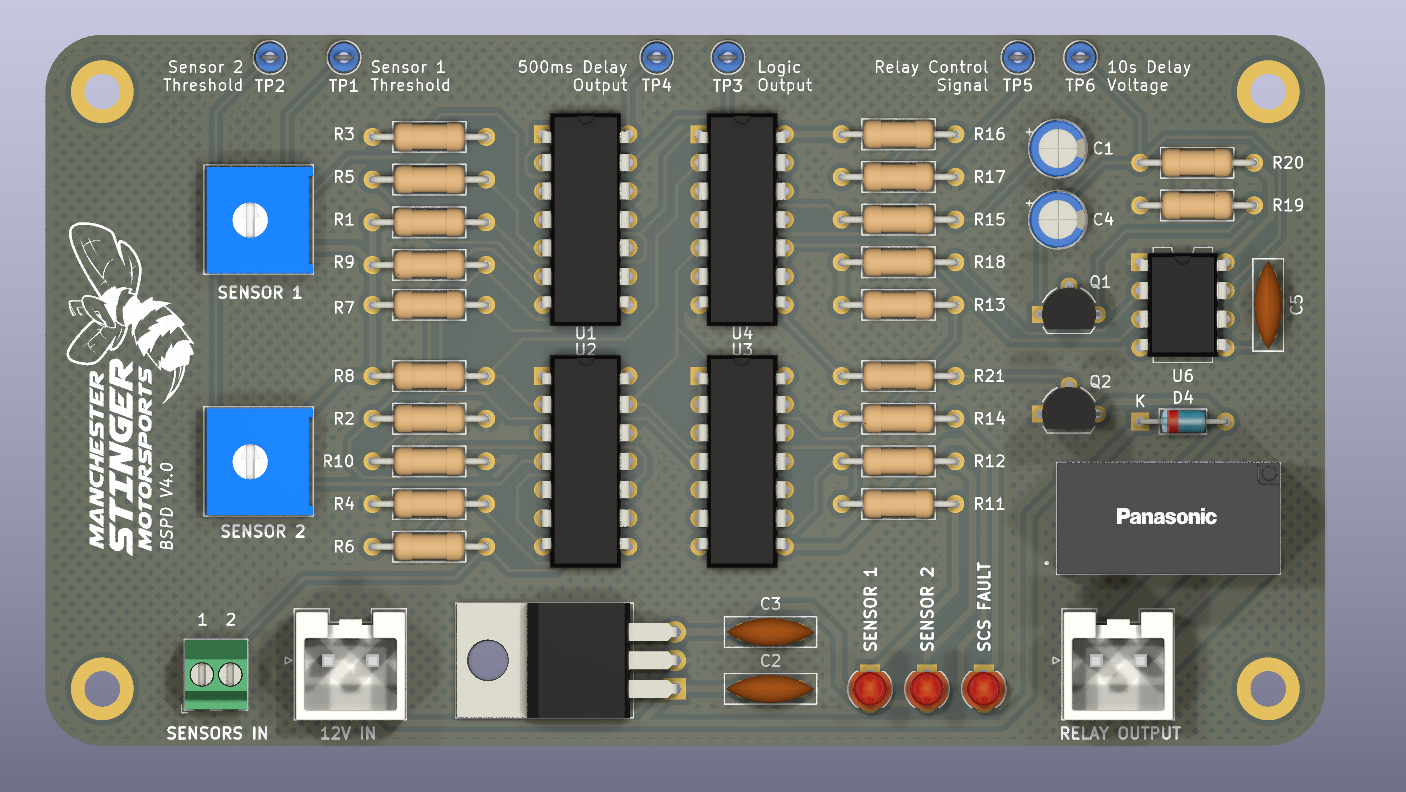 BSPD top view designed in Kicad
BSPD top view designed in Kicad
A safety-critical component of the car that performs plausibility check between brake pressure and throttle position only using non-programmable logic.
[BSPD Github Repo], [Schematic]
UK Cansat Parachute and Landing Legs Deployment Design
As the Power Electronics Lead and CAD Lead, I am mostly involved in innovating a 2-stage landing and parachute deployment system with a single servo motor. The video is a test of the initial test of the 3d printeed landing gear prototype printed with my 3D printer.
Hexapod Spyders Project
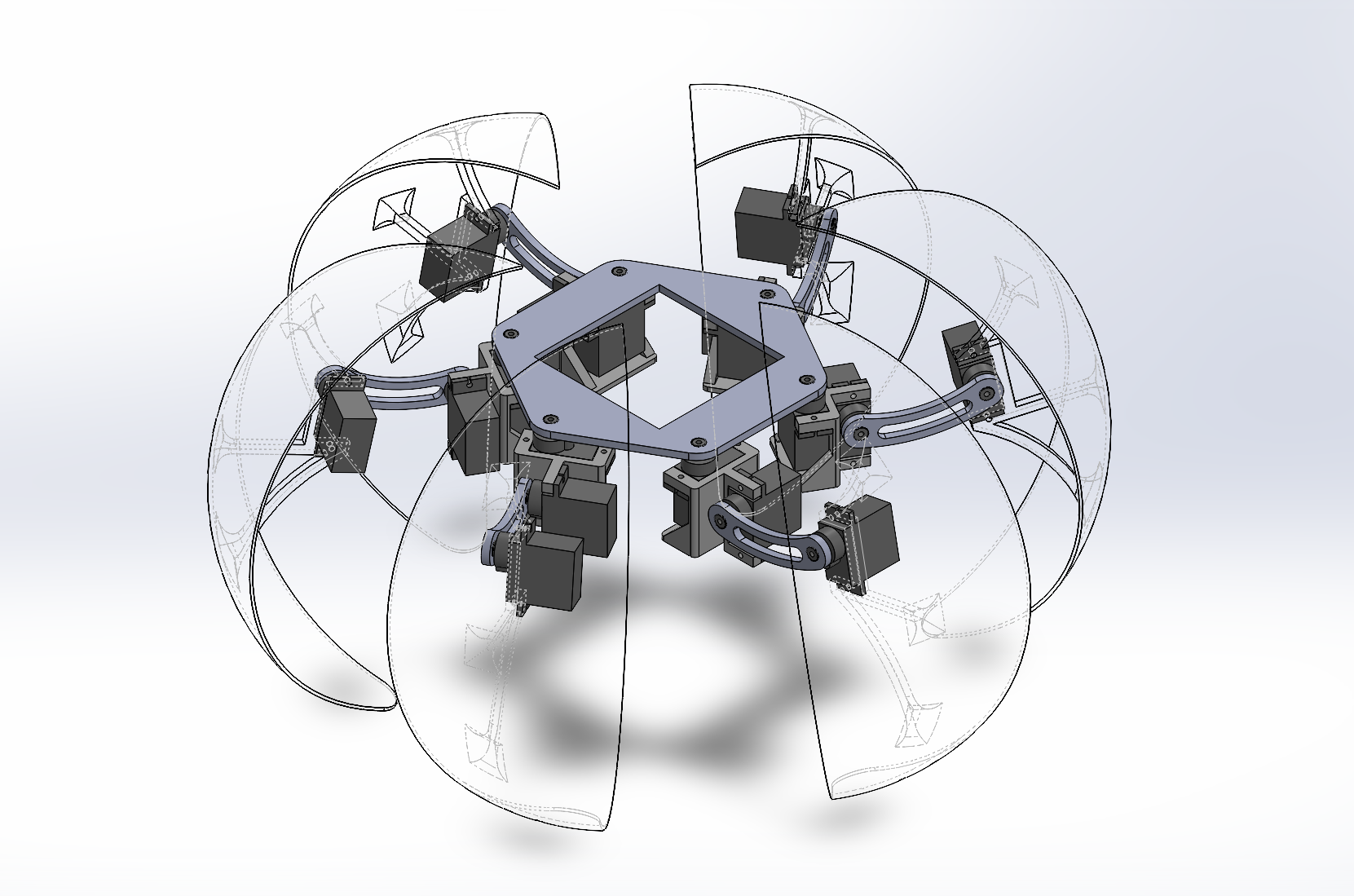 Designed the robot in SOLIDWORKS
Designed the robot in SOLIDWORKS
A more advanced robotics team project involving ROS (Robot Operating System). Involved with the hardware design and software simulation.
Maze Solver Robot
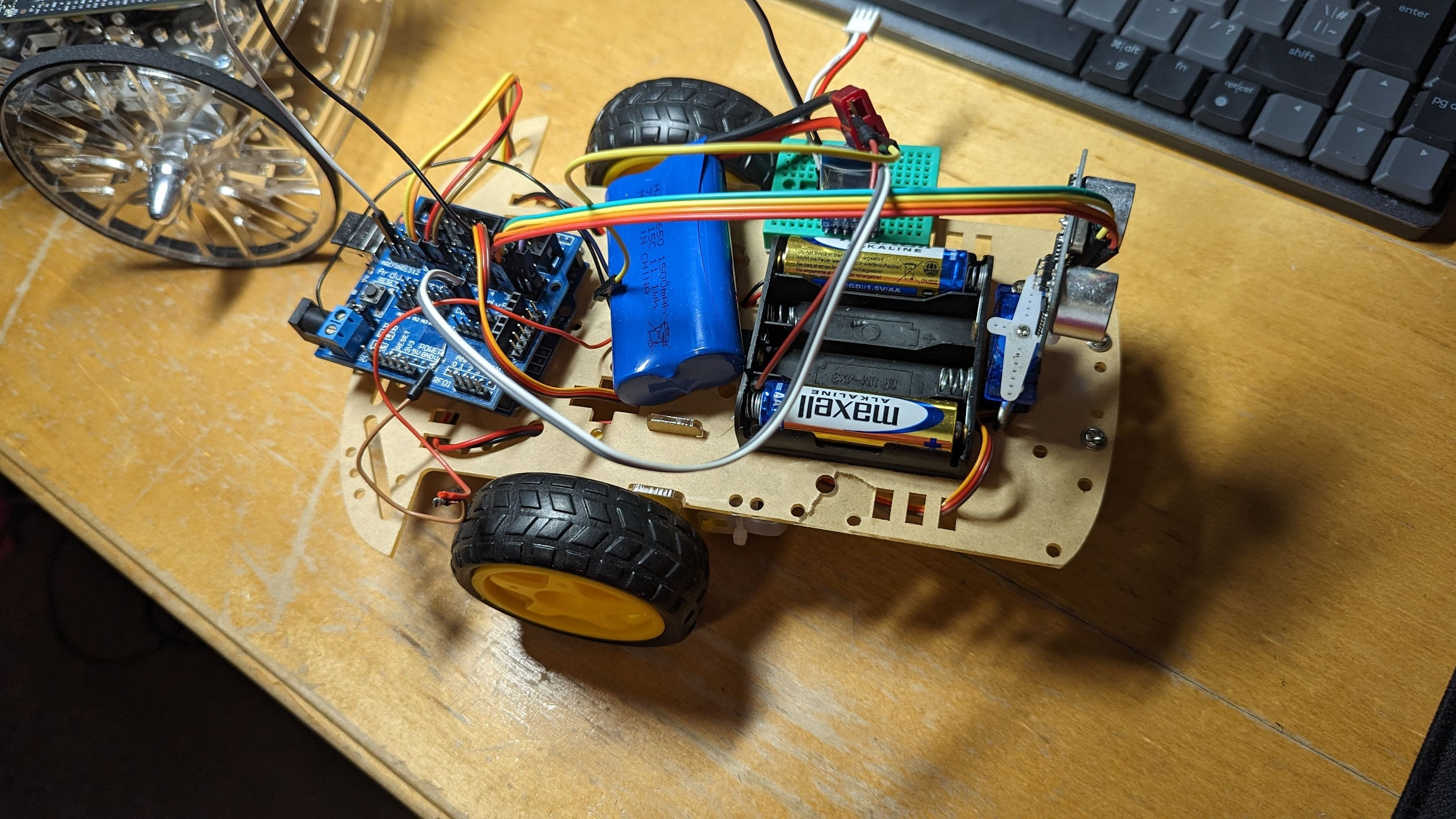 Arduino uno based maze solver robot
Arduino uno based maze solver robot
My first introduction to Arduino World. Implemented simple algorithm with motor feedback loop to solve the maze.
F1 in Schools
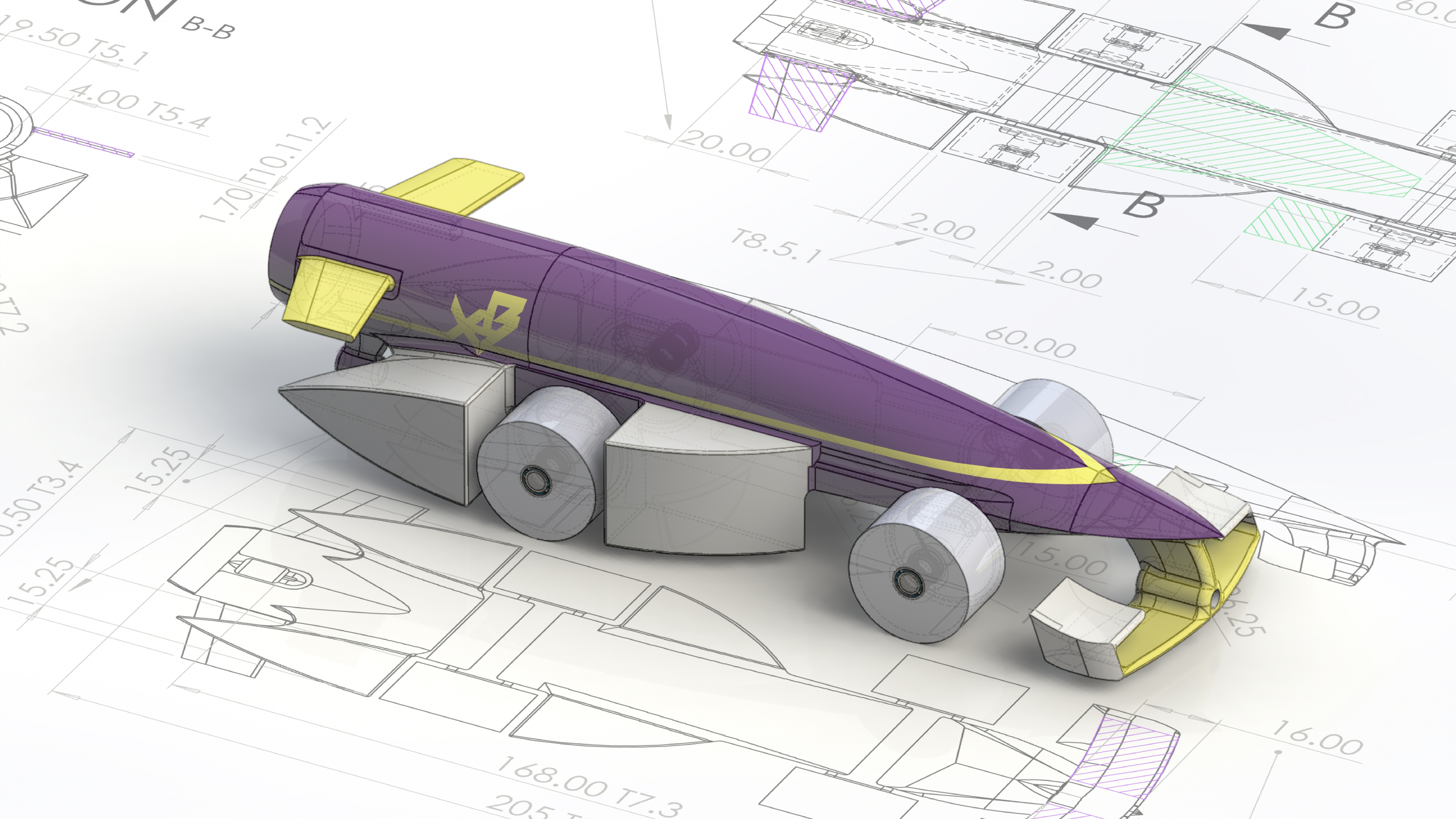 One of my best 3D renders made using only SOLIDWORKS
One of my best 3D renders made using only SOLIDWORKS
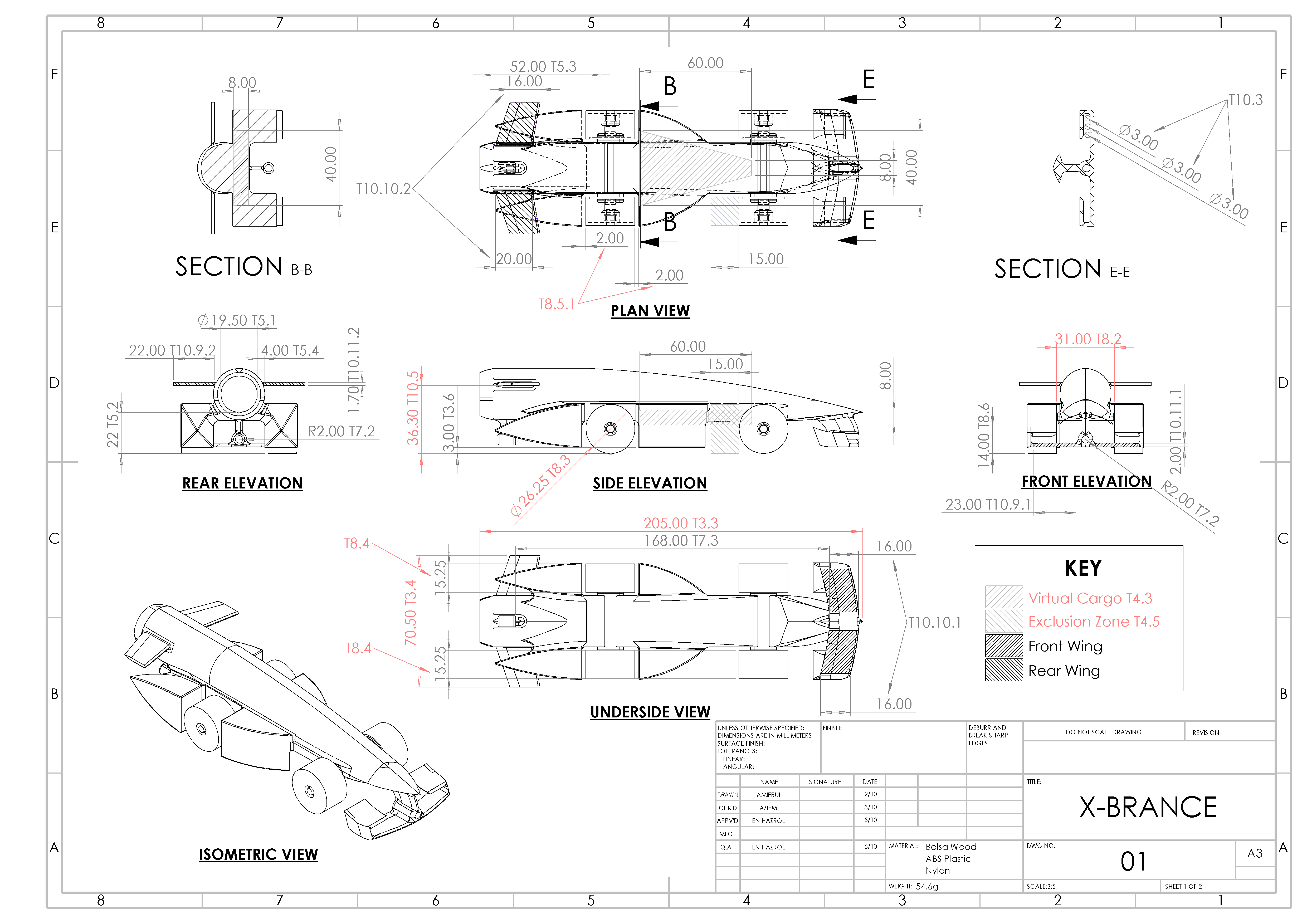 The drawing with dimensions of critical rules in red
The drawing with dimensions of critical rules in red
Used SOLIDWORKS to design the car and run FEA and CFD simulations to optimise its performance. Utilised CNC Milling and 3D Printing for precise and efficient manufacturing processes. Two times “Fastest Car Award” winner and represented Malaysia in the World Finals 2017.
Skills
- Programming
- Embedded C/C++
- Python
- MATLAB & Simulink
- VHDL
- PCB Design
- Altium Designer
- Kicad
- 3D CAD
- SOLIDWORKS
- Onshape
- Fusion 360
- 3D Printing
- Own Personal Hobby 3D Printer
- Linux
- Ubuntu
- Robot Operating System (ROS)
- Debian based distros
References
Theodor Heath (3rd Year Project Supervisor) - theodor.heath@manchester.ac.uk
Wuliang Yin (2nd Year Project Supervisor) - wuliang.yin@manchester.ac.uk [Reference Letter]