Contains all the functionality of the ESP motor driver board. More...
#include <motor_driver_board.h>
Public Member Functions | |
| MotorDriverBoard (PinName enable_pin, PinName monitor_pin) | |
| Construct a new MotorDriverBoard object. | |
| void | update_measurements (void) |
| updates the measurements of voltage and current values | |
| void | set_enable (bool expression) |
| enable pin will be set to the boolean value in the paremeter | |
| void | enable (void) |
| causes the enable pin to be set to HIGH | |
| void | disable (void) |
| causes the enable pin to be set to LOW | |
| float | get_voltage (void) |
| returns the actual voltage value | |
| float | get_current (void) |
| returns the actual curent value | |
| bool | get_enable_state (void) |
| returns the state of the enable pin | |
Protected Attributes | |
| DigitalOut | board_enable |
| pin responsible for enabling the board | |
| bool | enable_state |
| state of the enable pin | |
| int | VoltageReading |
| int | CurrentReading |
| gets the value of voltage and current as integers per unit value referred to in the ds2781.cpp in more detail | |
| float | Voltage |
| float | Current |
| actual value of the voltage and current | |
Detailed Description
Contains all the functionality of the ESP motor driver board.
Functionality:
- enable/disable the board using the "enable" pin
- read voltage and current used by the whole driver board
Uses this Library by Sam Walsh to interface with the current/voltage IC. https://os.mbed.com/users/EmbeddedSam/code/Nucleo_F401RE_DS271_Battery_Monitor/
Definition at line 26 of file motor_driver_board.h.
Constructor & Destructor Documentation
◆ MotorDriverBoard()
| MotorDriverBoard::MotorDriverBoard | ( | PinName | enable_pin, |
| PinName | monitor_pin ) |
Construct a new MotorDriverBoard object.
- Parameters
-
enable_pin motor driver board enable (EN) pin monitor_pin motor driver board monitor (OneWire) pin
Definition at line 13 of file motor_driver_board.cpp.

Member Function Documentation
◆ disable()
| void MotorDriverBoard::disable | ( | void | ) |
causes the enable pin to be set to LOW
Definition at line 26 of file motor_driver_board.cpp.
◆ enable()
| void MotorDriverBoard::enable | ( | void | ) |
causes the enable pin to be set to HIGH
Definition at line 19 of file motor_driver_board.cpp.
◆ get_current()
| float MotorDriverBoard::get_current | ( | void | ) |
returns the actual curent value
- Returns
- float current
Definition at line 52 of file motor_driver_board.cpp.

◆ get_enable_state()
| bool MotorDriverBoard::get_enable_state | ( | void | ) |
returns the state of the enable pin
- Returns
- true if pin is enabled
- false if pin is disabled
Definition at line 58 of file motor_driver_board.cpp.
◆ get_voltage()
| float MotorDriverBoard::get_voltage | ( | void | ) |
returns the actual voltage value
- Returns
- float voltage
Definition at line 47 of file motor_driver_board.cpp.

◆ set_enable()
| void MotorDriverBoard::set_enable | ( | bool | expression | ) |
enable pin will be set to the boolean value in the paremeter
- Parameters
-
expression boolean value or operation to be applied
Definition at line 41 of file motor_driver_board.cpp.
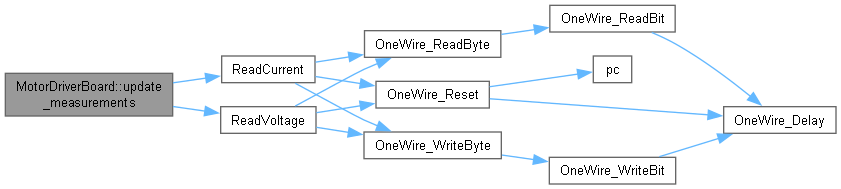
◆ update_measurements()
| void MotorDriverBoard::update_measurements | ( | void | ) |
updates the measurements of voltage and current values
Definition at line 33 of file motor_driver_board.cpp.

Member Data Documentation
◆ board_enable
|
protected |
pin responsible for enabling the board
Definition at line 30 of file motor_driver_board.h.
◆ Current
|
protected |
actual value of the voltage and current
Definition at line 34 of file motor_driver_board.h.
◆ CurrentReading
|
protected |
gets the value of voltage and current as integers per unit value referred to in the ds2781.cpp in more detail
Definition at line 33 of file motor_driver_board.h.
◆ enable_state
|
protected |
state of the enable pin
Definition at line 31 of file motor_driver_board.h.
◆ Voltage
|
protected |
Definition at line 34 of file motor_driver_board.h.
◆ VoltageReading
|
protected |
Definition at line 33 of file motor_driver_board.h.
The documentation for this class was generated from the following files:
- include/motor_driver_board.h
- src/motor_driver_board.cpp