Loading...
Searching...
No Matches
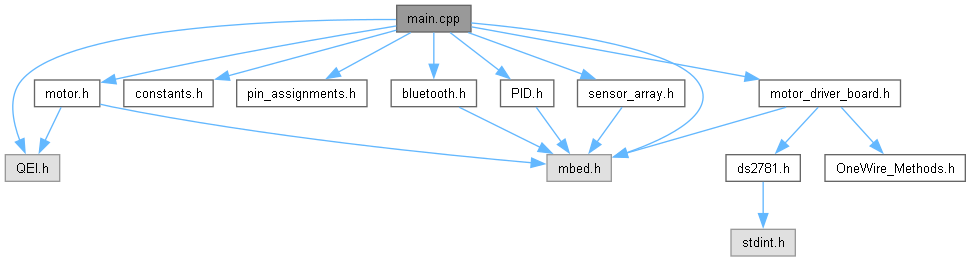
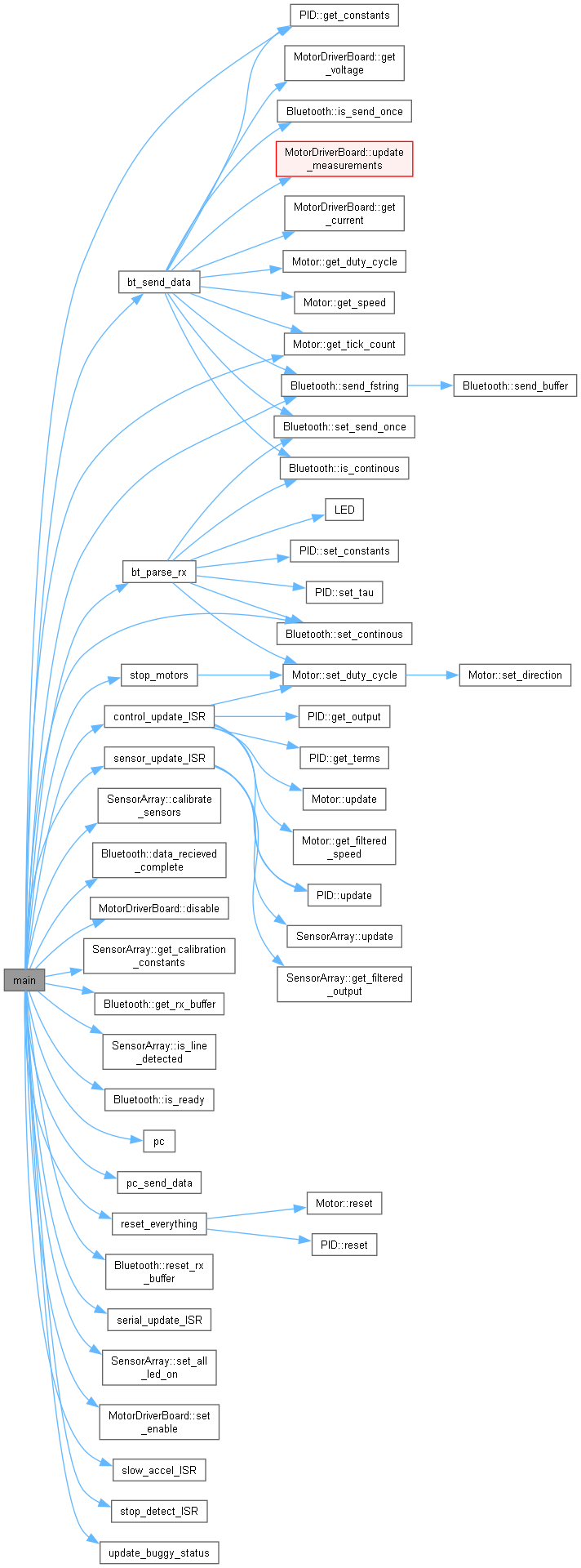
main.cpp File Reference
main buggy code More...
#include "mbed.h"#include "QEI.h"#include "constants.h"#include "pin_assignments.h"#include "bluetooth.h"#include "motor.h"#include "PID.h"#include "motor_driver_board.h"#include "sensor_array.h"
Include dependency graph for main.cpp:
Go to the source code of this file.
Classes | |
| struct | Buggy_status |
| Represents the status of a buggy. More... | |
Enumerations | |
| enum | Bt_cmd_chars { ch_execute = 'E' , ch_get = 'G' , ch_set = 'S' , ch_continous = 'C' , ch_stop = 'S' , ch_active_stop = 'X' , ch_uturn = 'U' , ch_encoder_test = 'E' , ch_motor_pwm_test = 'M' , ch_straight_test = 'Z' , ch_square_test = 'Q' , ch_PID_test = 'P' , ch_toggle_led_test = 'L' , ch_line_follow = 'F' , ch_static_tracking = 'T' , ch_line_follow_auto = 'A' , ch_calibrate = 'C' , ch_pwm_duty = 'D' , ch_ticks_cumulative = 'E' , ch_speed = 'S' , ch_gains_PID = 'P' , ch_tau_PID = 'T' , ch_current_usage = 'C' , ch_runtime = 'R' , ch_loop_time = 'X' , ch_loop_count = 'Y' , ch_motor_left = 'L' , ch_motor_right = 'R' , ch_motor_both = 'B' , ch_sensor = 'S' , ch_no_obj = 'D' } |
| enum | Buggy_modes { square_mode , straight_test , PID_test , line_test , line_follow , task_test , task_test_inactive , inactive , active_stop , uturn , static_tracking , line_follow_auto , stop_detect_line , calibration } |
Functions | |
| DigitalOut | LED (LED_PIN) |
| Serial | pc (USBTX, USBRX, 115200) |
| void | stop_motors (void) |
| Set pwm dc to 0 for both motors. | |
| void | update_buggy_status (int tick_count_left, int tick_count_right) |
| Update buggy status variables. | |
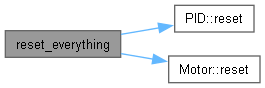
| void | reset_everything (void) |
| Reset all buggy values and all objects variables. | |
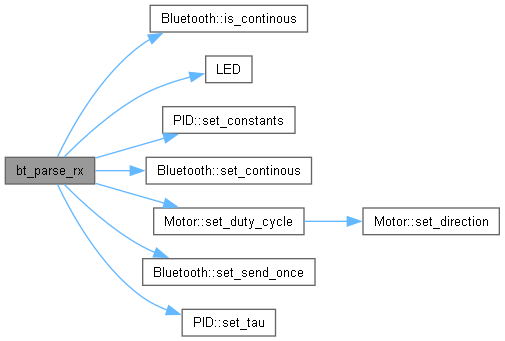
| bool | bt_parse_rx (char *rx_buffer) |
| Parse recieved bluetooth data. | |
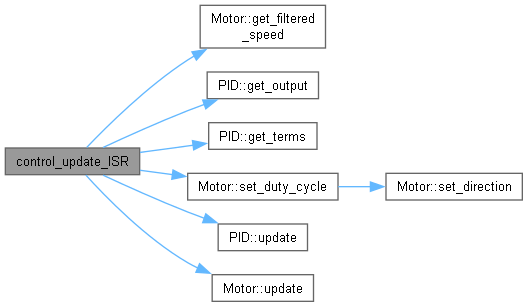
| void | control_update_ISR (void) |
| ISR updating the control algorithm. | |
| void | serial_update_ISR (void) |
| ISR to update flag to send data to pc/bt in main() | |
| void | stop_detect_ISR (void) |
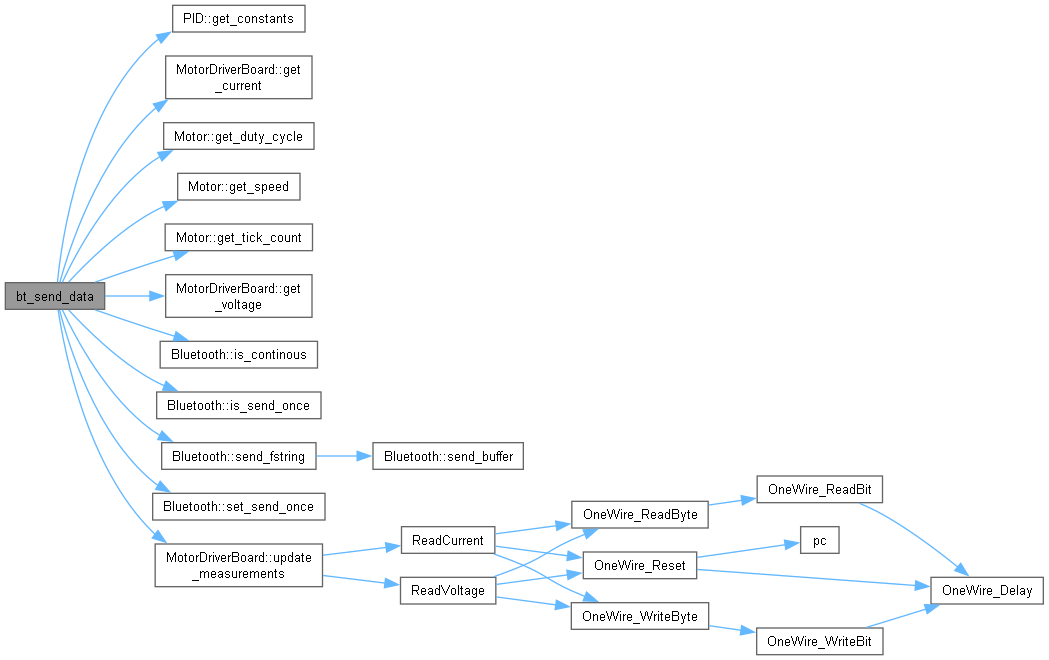
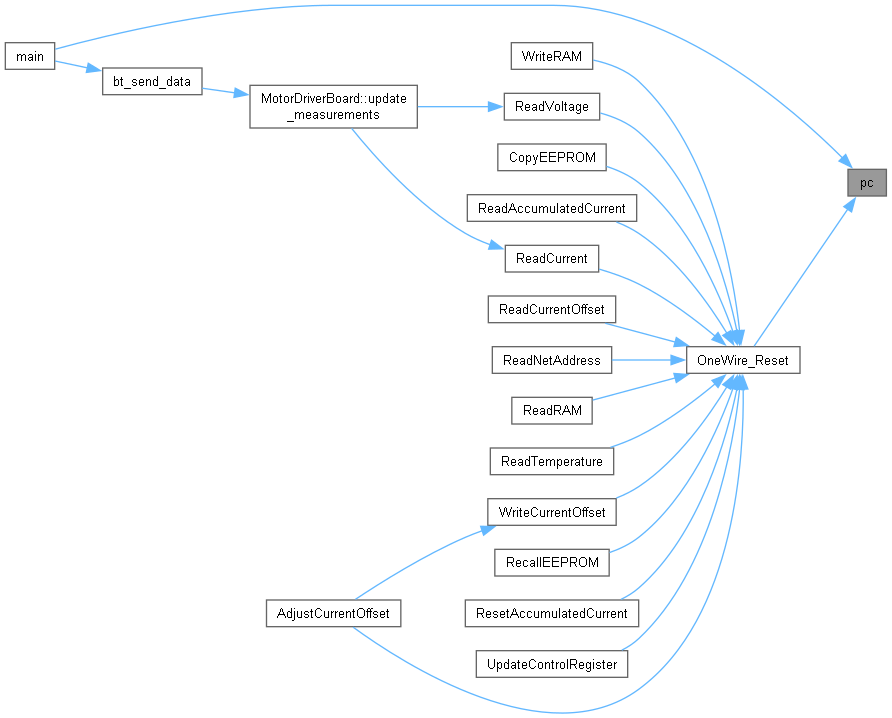
| void | bt_send_data (void) |
| Send data to the bt module. | |
| void | pc_send_data (void) |
| Send data to the pc. | |
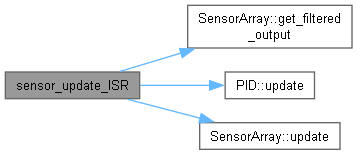
| void | sensor_update_ISR () |
| void | slow_accel_ISR (void) |
| int | main () |
Detailed Description
Enumeration Type Documentation
◆ Bt_cmd_chars
| enum Bt_cmd_chars |
◆ Buggy_modes
| enum Buggy_modes |
Function Documentation
◆ bt_parse_rx()
| bool bt_parse_rx | ( | char * | rx_buffer | ) |

◆ bt_send_data()
| void bt_send_data | ( | void | ) |

◆ control_update_ISR()
| void control_update_ISR | ( | void | ) |

◆ LED()
| DigitalOut LED | ( | LED_PIN | ) |
Here is the caller graph for this function:

◆ main()
◆ pc()
| Serial pc | ( | USBTX | , |
| USBRX | , | ||
| 115200 | ) |
Here is the caller graph for this function:
◆ pc_send_data()
| void pc_send_data | ( | void | ) |

◆ reset_everything()
| void reset_everything | ( | void | ) |

◆ sensor_update_ISR()
| void sensor_update_ISR | ( | void | ) |

◆ serial_update_ISR()
| void serial_update_ISR | ( | void | ) |

◆ slow_accel_ISR()
| void slow_accel_ISR | ( | void | ) |

◆ stop_detect_ISR()
| void stop_detect_ISR | ( | void | ) |

◆ stop_motors()
| void stop_motors | ( | void | ) |


◆ update_buggy_status()
| void update_buggy_status | ( | int | tick_count_left, |
| int | tick_count_right ) |

Variable Documentation
◆ bt
◆ bt_data_sent
◆ bt_float_data
◆ bt_obj_sent
◆ bt_serial_update
◆ buggy_mode
| Buggy_modes buggy_mode |
◆ buggy_status
| Buggy_status buggy_status = {0} |
◆ cal_constants
◆ control_ticker
◆ data_log
◆ driver_board
| MotorDriverBoard driver_board(DRIVER_ENABLE_PIN, DRIVER_MONITOR_PIN) | ( | DRIVER_ENABLE_PIN | , |
| DRIVER_MONITOR_PIN | ) |
◆ global_timer
◆ ISR_exec_time
◆ lf_velocity
| volatile float lf_velocity = LINE_FOLLOW_VELOCITY |
◆ log_index
◆ logic_timout
◆ loop_exec_time
◆ motor_left
| Motor motor_left(MOTORL_PWM_PIN, MOTORL_DIRECTION_PIN, MOTORL_BIPOLAR_PIN, MOTORL_CHA_PIN, MOTORL_CHB_PIN, PULSE_PER_REV, MOTOR_PWM_FREQ, CONTROL_UPDATE_RATE, LP_SPEED_A0, LP_SPEED_B0, LP_SPEED_B1, WHEEL_RADIUS) | ( | MOTORL_PWM_PIN | , |
| MOTORL_DIRECTION_PIN | , | ||
| MOTORL_BIPOLAR_PIN | , | ||
| MOTORL_CHA_PIN | , | ||
| MOTORL_CHB_PIN | , | ||
| PULSE_PER_REV | , | ||
| MOTOR_PWM_FREQ | , | ||
| CONTROL_UPDATE_RATE | , | ||
| LP_SPEED_A0 | , | ||
| LP_SPEED_B0 | , | ||
| LP_SPEED_B1 | , | ||
| WHEEL_RADIUS | ) |
◆ motor_right
| Motor motor_right(MOTORR_PWM_PIN, MOTORR_DIRECTION_PIN, MOTORR_BIPOLAR_PIN, MOTORR_CHA_PIN, MOTORR_CHB_PIN, PULSE_PER_REV, MOTOR_PWM_FREQ, CONTROL_UPDATE_RATE, LP_SPEED_A0, LP_SPEED_B0, LP_SPEED_B1, WHEEL_RADIUS) | ( | MOTORR_PWM_PIN | , |
| MOTORR_DIRECTION_PIN | , | ||
| MOTORR_BIPOLAR_PIN | , | ||
| MOTORR_CHA_PIN | , | ||
| MOTORR_CHB_PIN | , | ||
| PULSE_PER_REV | , | ||
| MOTOR_PWM_FREQ | , | ||
| CONTROL_UPDATE_RATE | , | ||
| LP_SPEED_A0 | , | ||
| LP_SPEED_B0 | , | ||
| LP_SPEED_B1 | , | ||
| WHEEL_RADIUS | ) |
◆ pc_serial_update
◆ PID_angle
| PID PID_angle(PID_A_KP, PID_A_KI, PID_A_KD, PID_A_TAU, PID_A_MIN_OUT, PID_A_MAX_OUT, PID_A_MIN_INT, PID_A_MAX_INT, CONTROL_UPDATE_PERIOD) | ( | PID_A_KP | , |
| PID_A_KI | , | ||
| PID_A_KD | , | ||
| PID_A_TAU | , | ||
| PID_A_MIN_OUT | , | ||
| PID_A_MAX_OUT | , | ||
| PID_A_MIN_INT | , | ||
| PID_A_MAX_INT | , | ||
| CONTROL_UPDATE_PERIOD | ) |
◆ pid_constants
◆ PID_motor_left
| PID PID_motor_left(PID_M_L_KP, PID_M_L_KI, PID_M_L_KD, PID_M_TAU, PID_M_MIN_OUT, PID_M_MAX_OUT, PID_M_MIN_INT, PID_M_MAX_INT, CONTROL_UPDATE_PERIOD) | ( | PID_M_L_KP | , |
| PID_M_L_KI | , | ||
| PID_M_L_KD | , | ||
| PID_M_TAU | , | ||
| PID_M_MIN_OUT | , | ||
| PID_M_MAX_OUT | , | ||
| PID_M_MIN_INT | , | ||
| PID_M_MAX_INT | , | ||
| CONTROL_UPDATE_PERIOD | ) |
◆ PID_motor_right
| PID PID_motor_right(PID_M_R_KP, PID_M_R_KI, PID_M_R_KD, PID_M_TAU, PID_M_MIN_OUT, PID_M_MAX_OUT, PID_M_MIN_INT, PID_M_MAX_INT, CONTROL_UPDATE_PERIOD) | ( | PID_M_R_KP | , |
| PID_M_R_KI | , | ||
| PID_M_R_KD | , | ||
| PID_M_TAU | , | ||
| PID_M_MIN_OUT | , | ||
| PID_M_MAX_OUT | , | ||
| PID_M_MIN_INT | , | ||
| PID_M_MAX_INT | , | ||
| CONTROL_UPDATE_PERIOD | ) |
◆ PID_sensor
| PID PID_sensor(PID_S_KP, PID_S_KI, PID_S_KD, PID_S_TAU, PID_S_MIN_OUT, PID_S_MAX_OUT, PID_S_MIN_INT, PID_S_MAX_INT, SENSOR_UPDATE_PERIOD) | ( | PID_S_KP | , |
| PID_S_KI | , | ||
| PID_S_KD | , | ||
| PID_S_TAU | , | ||
| PID_S_MIN_OUT | , | ||
| PID_S_MAX_OUT | , | ||
| PID_S_MIN_INT | , | ||
| PID_S_MAX_INT | , | ||
| SENSOR_UPDATE_PERIOD | ) |
◆ prev_buggy_mode
| Buggy_modes prev_buggy_mode |